On 25 February 2022, the article „Passive, Active, and Proactive Systems and Machines for the Protection and Preservation of Animals and Animal Species“ by Oliver Bendel was published in Frontiers in Animal Science. From the abstract: „Digitalization and automation are expanding into many areas, resulting in more widespread use of partially and fully autonomous machines and robots. At the same time, environmental and other crises and disasters are on the rise, the world population is growing, and animals are losing their habitat. Increasingly, machines and robots such as agricultural vehicles, autonomous cars, robotic lawnmowers, or social robots are encountering animals of all kinds. In the process, the latter are injured or killed. Some machines can be designed so that this does not happen. Relevant disciplines and research areas briefly introduced here are machine ethics, social robotics, animal-machine interaction, and animal-computer interaction. In addition, animal welfare is important. Passive and active machines—as they are called in this review—are already appearing and help to observe and protect animals. Proactive machines may play a role in the future. They could use the possibilities of full automation and autonomy to save animals from suffering in agriculture or in the wild. During crises and disasters and in extensive nature reserves, they could observe, care for, and protect animals. The review provides initial considerations on active, passive, and proactive machines and how they can be used in an animal preservation context while bearing in mind recent technical and global developments.“ The article is part of the research topic „Animal-Computer Interaction and Beyond: The Benefits of Animal-Centered Research and Design“ and can be accessed at www.frontiersin.org/articles/10.3389/fanim.2022.834634/full.
Fig.: Machines and robots can support and save animals
Die Verschmutzung der Gewässer durch Plastik ist ein Thema, das seit ein paar Jahren ständig in den Medien zu finden ist. Bereits 2015 wurde an der Hochschule für Technik FHNW und der Hochschule für Wirtschaft FHNW untersucht, ob ein Roboterfisch – in der Art des CLEANINGFISH (2014) von Oliver Bendel – eine Lösung sein könnte. 2018 wurde von dem Informations- und Maschinenethiker eine weitere Arbeit vergeben, mit dem Auftrag, mehrere bestehende oder geplante Projekte zu untersuchen, die sich der Meeresverschmutzung annehmen. Als Grundlage der Abschlussarbeit im Studiengang EUT von Rolf Stucki diente „eine Literaturrecherche zum aktuellen Stand der Plastikproblematik weltweit und deren Auswirkungen, aber auch zu den Eigenschaften und Vorzügen von Kunststoffen“ (Management Summary). „Zusätzlich wurden Interviews mit Vertreterinnen und Vertretern der Projekte geführt. Um die internen Unternehmensfaktoren (Stärken, Schwächen) und externen Umweltfaktoren (Chancen, Risiken) zu beurteilen, wurden anhand der Antworten und der Recherche SWOT-Analysen erstellt.“ (Management Summary) Die Resultate zeigen laut Stucki, dass die meisten Projekte finanziell abhängig sind von Sponsoren und Geldgebern. Zwei von ihnen seien außerdem in der Konzeptphase; sie sollten mittelfristig die technische und finanzielle Machbarkeit nachweisen. Mit Blick auf das soziale Engagement lasse sich sagen, dass alle sechs Projekte sehr aktiv sind. Ein Plakat zeigt einen Vergleich (die Fotos wurden für die Publikation in diesem Blog verfremdet). Als Roboter sticht WasteShark aus den Ansätzen heraus. Er ist sozusagen der CLEANINGFISH, der Realität geworden ist.
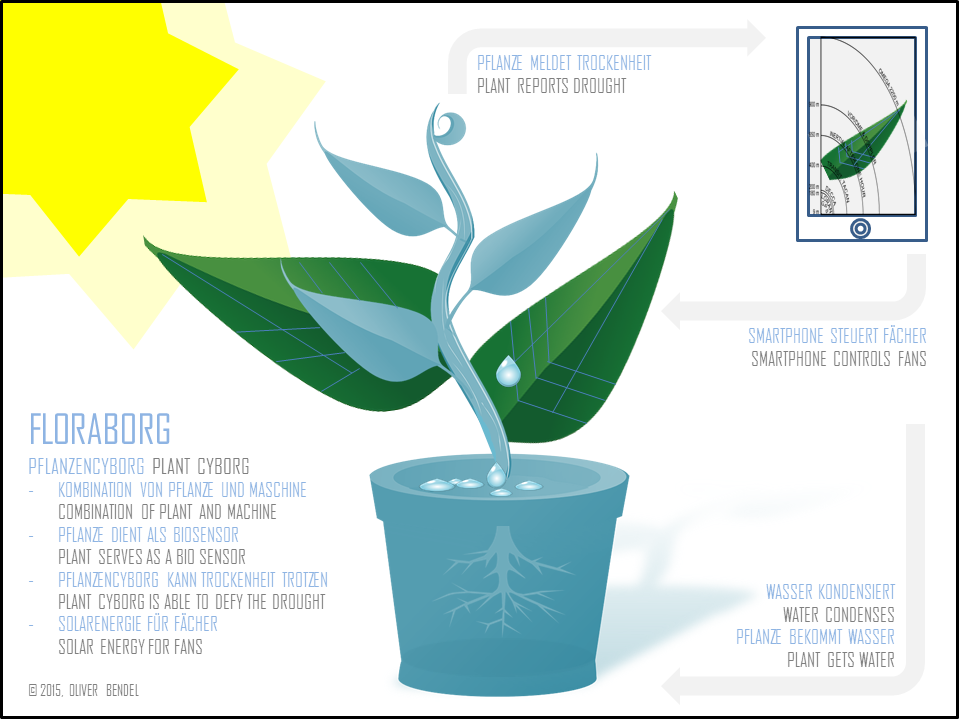
Der FLORABORG wurde 2015 von Oliver Bendel erdacht. Eine Pflanze dient als Biosensor und meldet über entsprechende Schnittstellen die Trockenheit an ein Smartphone. Dieses steuert Fächer, die mit der Pflanze verbunden sind und diese beschatten sowie Kondenswasser sammeln können. Die Idee war dabei, einen Pflanzencyborg zu entwickeln, und nicht unbedingt ein sinnvolles Bewässerungs- und Schutzsystem. Oliver Bendel lehnt Tiercyborgs wie RoboRoach ab, zudem die meisten Formen von Animal Enhancement. Gegen Pflanzencyborgs hat er nichts. In diese Richtung geht nun auch das MIT. Die ICTkommunikation vom 13. November 2017 meldet: „Landwirte, Betreiber von Treibhäusern und Blumenliebhaber erhalten künftig von ihren Pflanzen SOS-Signale, wenn diese zu wenig Wasser haben. Forscher am Massachusetts Institute of Technology (MIT) haben hierzu einen Sensor entwickelt, der Wassermangel von Pflanzen detektiert. Die Warnung landet auf einem Smartphone, sodass rechtzeitig gewässert werden kann.“ MIT-Professor Michael Strano und sein Assistent Volodymyr Koman stecken hinter der Erfindung. Letzterer sagt, dass der Sensor eine große Bedeutung bekommen wird „in einer Zeit des Klimawandels, der zu Wassermangel und steigenden Temperaturen führt“ (ICTkommunikation, 13. November 2017). Ob dieses System sinnvoll ist, muss sich zeigen.
Fei Fang (Harvard University) eröffnete die Talk Session 4 („Computational Sustainability“) beim AAAI Spring Symposium „AI for Social Good“ auf interaktive Weise, indem sie viele Fragen stellte und Antworten aus dem Auditorium einholte. Jennifer Sleeman begann die Vortragsreihe mit „Machine Learning the Temporal Evolution of Climate Change Assessment Research Using Dynamic Topic Models and Cross-Domain Divergence Maps“ (Paper zusammen mit Milton Halem, Tim Finin und Mark Cane). Einen Bezug zur Tierwelt schuf wiederum Jason Parham (Paper „Animal Population Censusing at Scale with Citizen Science and Photographic Identification“ mit Jonathan Crall, Charles Stewart u.a.). Er stellte invasive (etwa über Chips) und passive Verfahren (etwa über Kameras, auch von Bürgern und Touristen) der Tierzählung gegenüber. Zhiyu Wan präsentierte „Game Theory Can Expand Access to Genomic Data While Promoting Privacy“ (Co-Autoren sind Yevgeniy Vorobeychik, Weiyi Xia u.a.). Er ging u.a. auf das Risiko für die Privacy ein. Sara Marie Mc Carthy trug zum Projekt „PAWS-LITE: Extending the Deployment of Game Theoretic Applications for Environmental Crime Prevention“ vor, an dem neben ihr noch Milind Tambe und Chris Hallam beteiligt sind. PAWS wird in Uganda und Malaysia gegen Wilderei eingesetzt; es ist erfolgreich, aber sehr aufwendig. PAWS-LITE ist eine „light-weight Game Theoretic Application“. Neetu Pathak schloss den Vormittag mit „Understanding Social Media’s Take on Climate Change through Large-Scale Analysis of Targeted Opinions and Emotions“ (Co-Autoren Michael Henry und Svitlana Volkova) ab. User wurden nach persönlichen und nichtpersönlichen unterschieden, zudem nach Geschlecht, Alter etc. klassifiziert.
Am 28. März 2017 begann um 9.00 Uhr der zweite Tag des AAAI Spring Symposium „AI for Social Good“. Den Session Chair für die Talk Session 3 („Urban Planning“) hatte Virginia Dignum (Delft University of Technology) inne. Sie führte in das Thema ein und postulierte: „Artefacts have politics“. Sie erwähnte Anliegen der Maschinenethik und unterschiedliche Modelle der normativen Ethik, die man auf autonome Systeme anwenden kann. „Smart-City Planning with Constrained Crowd Judgment Analysis“ war der Titel des ersten Vortrags von Sujoy Chatterjee (Paper mit Anirban Mukhopadhyay und Malay Bhattacharyya). Syed Ali Asad Rizvi (Paper mit Elmarie van Heerden, Arnold Salas u.a.) trug zu „Identifying Sources of Discrimination Risk in the Life Cycle of Machine Intelligence Applications under New European Union Regulations“ vor. Er erwähnte einen „discrimination bias“ und fragte danach, wie man diesem begegnen kann. Daniela Rosu präsentierte das Paper „Knowledge-based Provisioning of Goods and Services: Towards a Virtual Social Needs Marketplace“, das zusammen mit Dionne M. Aleman, Christopher Beck u.a. erstellt wurde. Ausgangspunkt war, dass immer mehr Menschen Produkte und Dienstleistungen benötigen, die sie sich nicht leisten können. Es geht nun darum, diese in effizienter Weise von der Anbieter- zur Nachfragerseite zu bringen. Amin Ghafouri (Paper mit Aron Laszka, Abhishek Dubey und Xenofon Koutsoukos) referierte zu „Optimal Detection of Faulty Traffic Sensors Used in Route Planning“, Karen Judd Smith – den Fokus wieder stark erweiternd – zu „The AI Community and the United Nations: A Missing Global Conversation“.
Vom 27. bis 29. März 2017 finden die AAAI 2017 Spring Symposia statt. Veranstaltet werden sie von der Association for the Advancement of Artificial Intelligence, in Kooperation mit dem Department of Computer Science der Stanford University. Das Symposium „AI for the Social Good“ an der Stanford University widmet sich auch Themen der Roboter- und der Maschinenethik. Auf der Website heißt es: „A rise in real-world applications of AI has stimulated significant interest from the public, media, and policy makers, including the White House Office of Science and Technology Policy (OSTP). Along with this increasing attention has come media-fueled concerns about purported negative consequences of AI, which often overlooks the societal benefits that AI is delivering and can deliver in the near future. This symposium will focus on the promise of AI across multiple sectors of society.“ (Website AISOC) In einer Talk Session spricht Oliver Bendel über „LADYBIRD: the Animal-Friendly Robot Vacuum Cleaner“. In der Lightning Talks Session ist er nochmals vertreten, mit dem Vortrag „Towards Kant Machines“. In der gleichen Session referiert Mahendra Prasad über „A Framework for Modelling Altruistic Intelligence Explosions“ (vorangestellt ist der Titel „Back to the Future“), und Thomas Doherty geht der Frage „Can Artificial Intelligence have Ecological Intelligence?“ nach. Das ganze Programm kann über scf.usc.edu/~amulyaya/AISOC17/papers.html aufgerufen werden.
Im Studiengang Energie- und Umwelttechnik der Fachhochschule Nordwestschweiz FHNW, von der Hochschule für Technik verantwortet und von der Hochschule für Wirtschaft mitgetragen, wurde im Januar 2016 das Projekt „Umweltfreundliche Roboterautos“ beendet. Der Student Robin Güdel, betreut von Prof. Dr. Oliver Bendel (in diesem Studiengang der Dozent für Umwelt- und Unternehmensethik), hat zunächst fünf Fahrerassistenzsysteme bzw. Kommunikationsverfahren untersucht. Es habe sich „herausgestellt, dass die Energieeffizienz beträchtlich erhöht werden kann“ (Abschlussbericht). „Auch Emissionen wie Lärm, CO2 und andere Schadstoffe können dank dieser Systeme gesenkt werden. Die effektiven Einsparungen sind jedoch schwer zu quantifizieren, da diese von vielen Einflussfaktoren abhängen.“ (Abschlussbericht) Im Anschluss wurden Roboterautos unter die Lupe genommen. Ein Ergebnis war, dass neue Konzepte für die Nutzung des Automobils entstehen könnten. Beim „Carsharing der Zukunft“ handle es sich um eine Dienstleistung, bei welcher man mit Hilfe autonomer Fahrzeuge am Standort A abgeholt und zum Standort B transportiert wird. „Falls eine solche Dienstleistung stark genutzt wird, könnten viele Konsumenten von dem Besitz eines eigenen Fahrzeugs absehen.“ (Abschlussbericht)