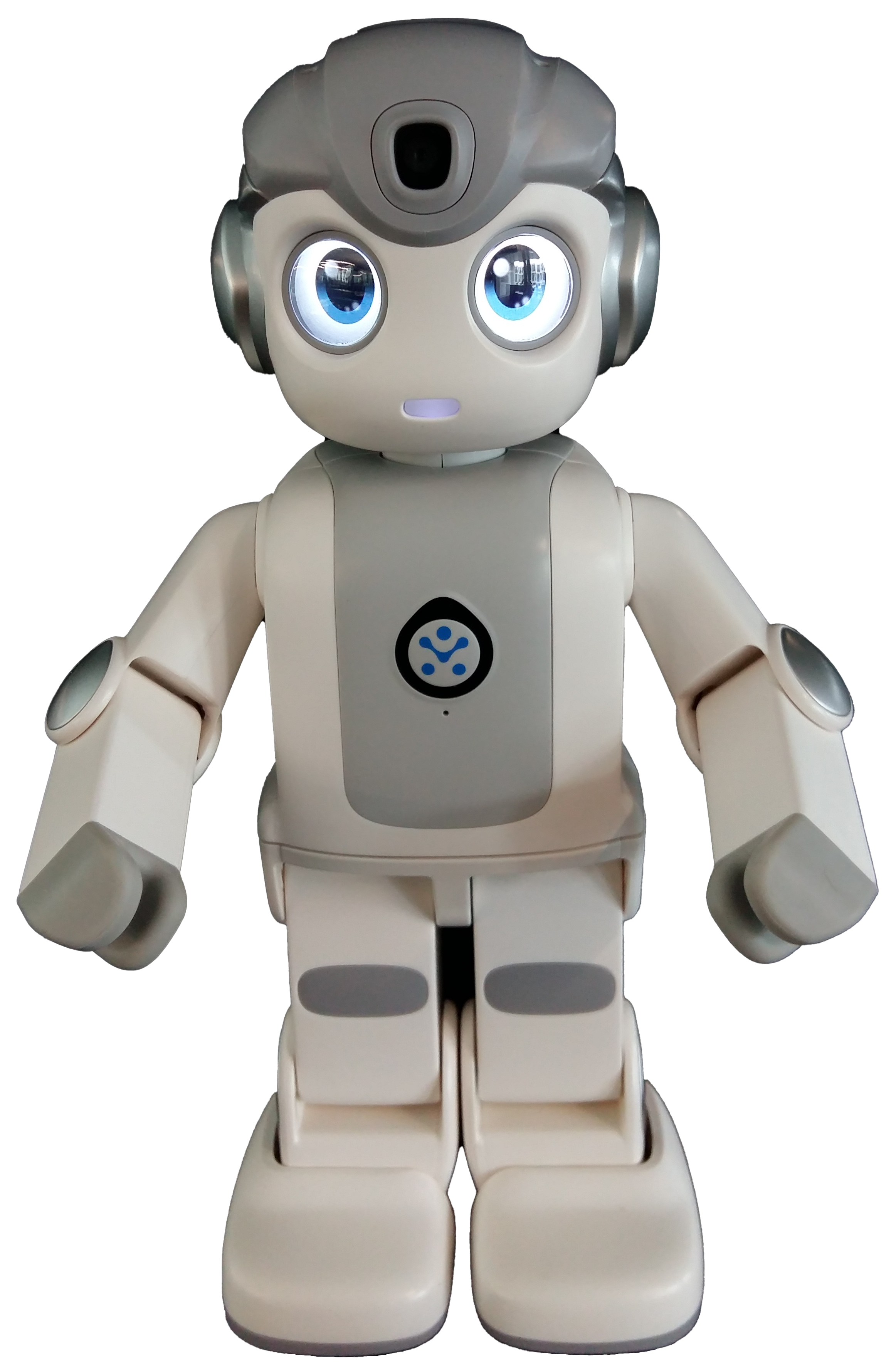
Anfang Dezember 2023 sind die Proceedings der ICSR 2023 erschienen. Der erste Band enthält den Beitrag „Alpha Mini as a Learning Partner in the Classroom“ von Oliver Bendel und Andrin Allemann. Aus dem Abstract: „Social robots such as NAO and Pepper are being used in some schools and universities. NAO is very agile and therefore entertaining. Pepper has the advantage that it has an integrated display where learning software of all kinds can be executed. One disadvantage of both is their high price. Schools can hardly afford such robots. This problem was the starting point for the project described here, which took place in 2023 at the School of Business FHNW. The aim was to create a learning application with an inexpensive social robot that has the same motor capabilities as NAO and the same knowledge transfer capabilities as Pepper. The small Alpha Mini from Ubtech was chosen. It was possible to connect it to an external device. This runs a learning game suitable for teaching at primary level. Alpha Mini provides explanations and feedback in each case. Three teachers tested the learning application, raised objections, and made suggestions for improvement. Social robots like Alpha Mini are an interesting solution for knowledge transfer in schools when they can communicate with other devices.“ Der Band kann über link.springer.com/book/10.1007/978-981-99-8715-3 heruntergeladen bzw. bestellt werden.
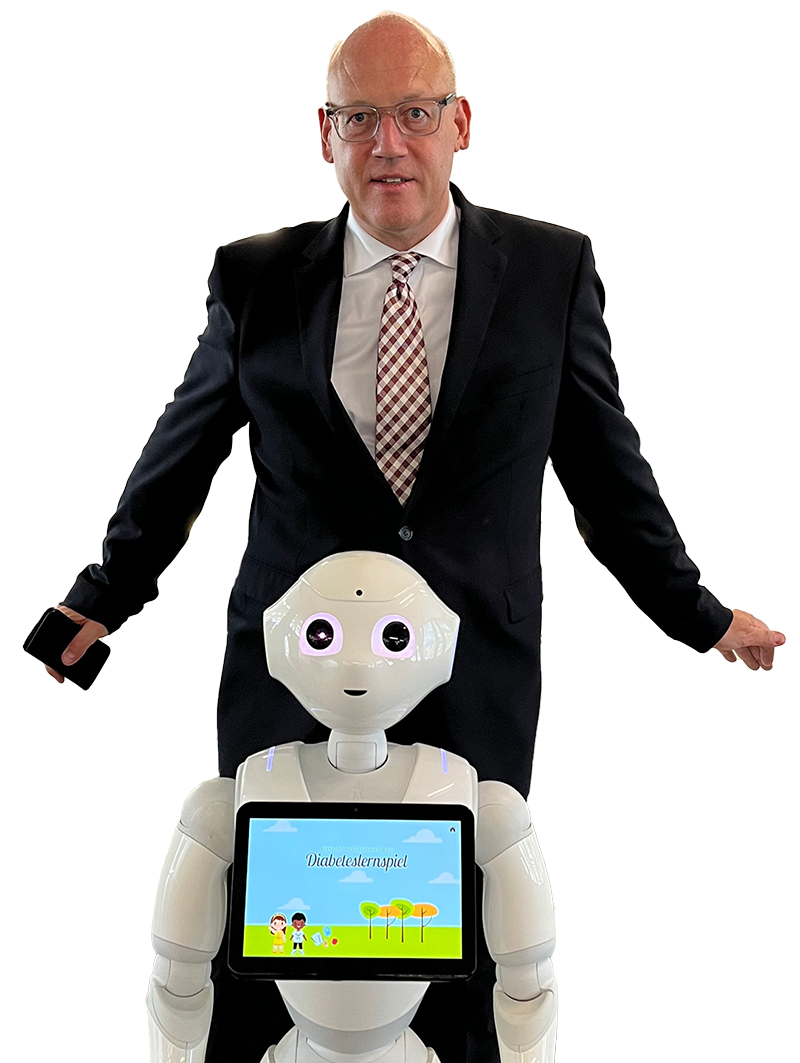
Anfang Dezember 2023 sind die Proceedings der ICSR 2023 erschienen. Der zweite Band enthält den Beitrag „Pepper as a Learning Partner in a Children’s Hospital“ von Sara Zarubica und Oliver Bendel. Aus dem Abstract: „Social robots are increasingly used in learning settings. So far, the main focus of this has been in school lessons and teaching at universities. Another possible setting is the children’s hospital. There, for example, young patients need to acquire basic knowledge about their disease so that they can deal with it appropriately. This should be done in a joyful, fun way, as the situation is stressful enough in itself, and so learning is also facilitated. The paper presents a learning application for diabetic children that runs on Pepper. This social robot was particularly well suited for this task because it has a large integrated touchscreen, similar to a tablet. A learning game is displayed on it that was developed especially for this setting. The children have to estimate the carbohydrate values of foods and meals or answer knowledge questions. The social robot gives verbal and gestural feedback in each case. The subjects responded overwhelmingly positively to the learning application. Pepper’s visible and audible feedback plays a special role in this. Social robots like Pepper are an interesting solution for knowledge transfer in a children’s hospital.“ Der Band kann über link.springer.com/book/10.1007/978-981-99-8718-4 heruntergeladen bzw. bestellt werden.
The proceedings of ICSR 2022 were published in early 2023. Included is the paper „The CARE-MOMO Project“ by Oliver Bendel and Marc Heimann. From the abstract: „In the CARE-MOMO project, a morality module (MOMO) with a morality menu (MOME) was developed at the School of Business FHNW in the context of machine ethics. This makes it possible to transfer one’s own moral and social convictions to a machine, in this case the care robot with the name Lio. The current model has extensive capabilities, including motor, sensory, and linguistic. However, it cannot yet be personalized in the moral and social sense. The CARE-MOMO aims to eliminate this state of affairs and to give care recipients the possibility to adapt the robot’s ‚behaviour‘ to their ideas and requirements. This is done in a very simple way, using sliders to activate and deactivate functions. There are three different categories that appear with the sliders. The CARE-MOMO was realized as a prototype, which demonstrates the functionality and aids the company in making concrete decisions for the product. In other words, it can adopt the morality module in whole or in part and further improve it after testing it in facilities.“ The book (part II of the proceedings) can be downloaded or ordered via link.springer.com/book/10.1007/978-3-031-24670-8.
The book „Culturally Sustainable Social Robotics“ (eds. Marco Nørskov, Johanna Seibt, and Oliver Santiago Quick) was published in December 2020 by IOS Press. From the publisher’s information: „Robophilosophy conferences have been the world’s largest venues for humanities research in and on social robotics. The book at hand presents the proceedings of Robophilosophy Conference 2020: Culturally Sustainable Social Robotics, the fourth event in the international, biennial Robophilosophy Conference Series, which brought together close to 400 participants from 29 countries. The speakers of the conference, whose contributions are collected in this volume, were invited to offer concrete proposals for how the Humanities can help to shape a future where social robotics is guided by the goals of enhancing socio-cultural values rather than by utility alone. The book is divided into 3 parts; Abstracts of Plenaries, which contains 6 plenary sessions; Session Papers, with 44 papers under 8 thematic categories; and Workshops, containing 25 items on 5 selected topics.“ (Website IOS Press) Contributors include Robert Sparrow, Alan Winfield, Aimee van Wynsberghe, John Danaher, Johanna Seibt, Marco Nørskov, Peter Remmers, John P. Sullins, and Oliver Bendel.
The proceedings of the AAAI conference 2016 have been published in March 2016 („The 2016 AAAI Spring Symposium Series: Technical Reports“). The symposium „Ethical and Moral Considerations in Non-Human Agents“ was dedicated to the discipline of machine ethics. Ron Arkin (Georgia Institute of Technology), Luís Moniz Pereira (Universidade Nova de Lisboa), Peter Asaro (New School for Public Engagement, New York) and Oliver Bendel (School of Business FHNW) spoke about moral and immoral machines. The contribution „Annotated Decision Trees for Simple Moral Machines“ (Oliver Bendel) can be found on the pages 195 – 201. In the abstract it is said: „Autonomization often follows after the automization on which it is based. More and more machines have to make decisions with moral implications. Machine ethics, which can be seen as an equivalent of human ethics, analyses the chances and limits of moral machines. So far, decision trees have not been commonly used for modelling moral machines. This article proposes an approach for creating annotated decision trees, and specifies their central components. The focus is on simple moral machines. The chances of such models are illustrated with the example of a self-driving car that is friendly to humans and animals. Finally the advantages and disadvantages are discussed and conclusions are drawn.“ The proceedings can be ordered via www.aaai.org.