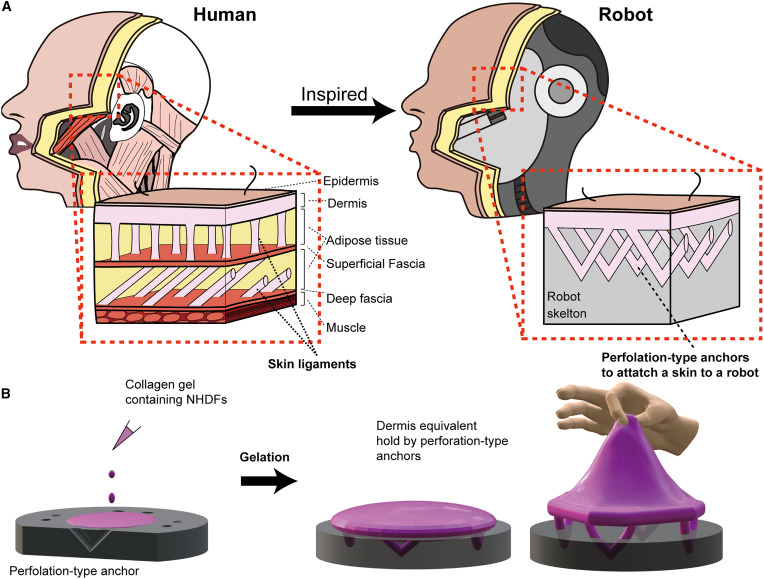
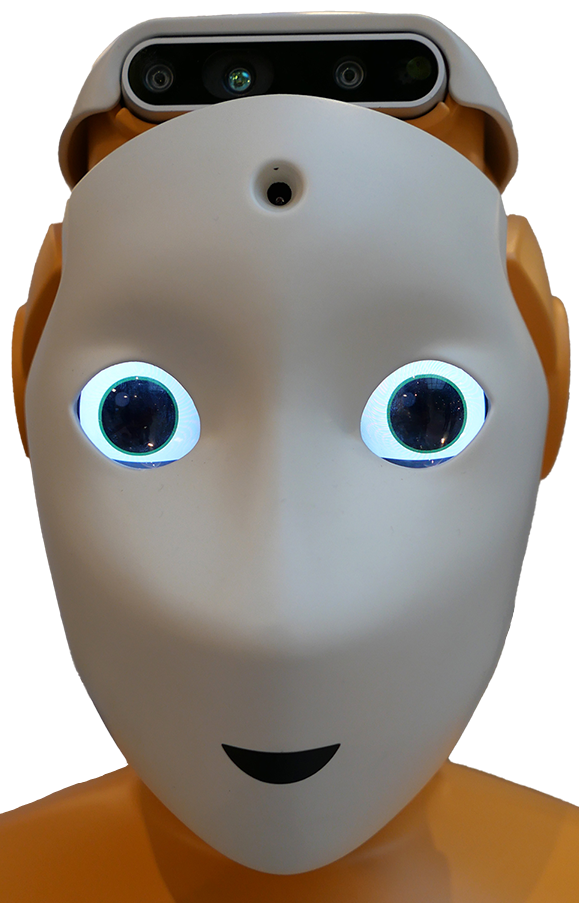
Scientists from The University of Tokyo have succeeded in applying living skin to a robot face. In their article „Perforation-type anchors inspired by skin ligament for robotic face covered with living skin“ they write: „Skin equivalent, a living skin model composed of cells and extracellular matrix, possesses the potential to be an ideal covering material for robots due to its biological functionalities. To employ skin equivalents as covering materials for robots, a secure method for attaching them to the underlying structure is required. In this study, we develop and characterize perforation-type anchors inspired by the structure of skin ligaments as a technique to effectively adhere skin equivalents to robotic surfaces. To showcase the versatility of perforation-type anchors in three-dimensional (3D) coverage applications, we cover a 3D facial mold with intricate surface structure with skin equivalent using perforation-type anchors. Furthermore, we construct a robotic face covered with dermis equivalent, capable of expressing smiles, with actuation through perforation-type anchors. With the above results, this research introduces an approach to adhere and actuate skin equivalents with perforation-type anchors, potentially contributing to advancements in biohybrid robotics.“ (Abstract) The result is an inverted or reversed cyborg. Oliver Bendel uses this term for technical structures that are supplemented with biological structures. It is also – another term used by Oliver Bendel – robot enhancement. There is no doubt that there will be more and more developments like this. Humans will become cyborgs, and robots will become reversed cyborgs.
Fig.: The tissue-fixation method (Image: Michio Kawai et al.)
Laptop manufacturer Lenovo launched the Lenovo Daystar robot in 2020. The design of the machine, with four wheels and a cobot on the back, was less than convincing. The latest development is different. The website ifdesign.com reports on the award winner: „Step into the forefront of industrial automation and public services with Lenovo Daystar Bot GS. The groundbreaking six-legged design guarantees unmatched stability and maneuverability that surpasses traditional robotic platforms, allowing it to traverse diverse terrains with ease.“ (iF DESIGN, 2024) The six legs are indeed unusual and a real eye-catcher. There is disagreement about the advantages. Perhaps the six legs provide more stability on stairs and very uneven terrain. The article continues: „Boasting an advanced control system, cutting-edge perception algorithms, and IP66 robust protection, GS outperforms in unforeseen scenarios, enabling comprehensive data collection at any location and time. In our unwavering pursuit of excellence, GS stands as a testament to innovation, efficiency, safety, and the boundless potential of automated exploration.“ (iF DESIGN, 2024) Interestingly, Lenovo itself has nothing to say about the product. However, the media are now reporting intensively. The next few months will bring more clarity about the Lenovo Daystar Bot GS.
As part of the AAAI 2023 Spring Symposia in San Francisco, the symposium „Socially Responsible AI for Well-being“ is organized by Takashi Kido (Teikyo University, Japan) and Keiki Takadama (The University of Electro-Communications, Japan). The paper „Increasing Well-being and Health through Robotic Hugs“ by Oliver Bendel, Andrea Puljic, Robin Heiz, Furkan Tömen, and Ivan De Paola was accepted. The talk will take place between March 26 and 29, 2023 at Hyatt Regency, San Francisco Airport. The symposium website states: „For our happiness, AI is not enough to be productive in exponential growth or economic/financial supremacies but should be socially responsible from the viewpoint of fairness, transparency, accountability, reliability, safety, privacy, and security. For example, AI diagnosis system should provide responsible results (e.g., a high-accuracy of diagnostics result with an understandable explanation) but the results should be socially accepted (e.g., data for AI (machine learning) should not be biased (i.e., the amount of data for learning should be equal among races and/or locations). Like this example, a decision of AI affects our well-being, which suggests the importance of discussing ‚What is socially responsible?‘ in several potential situations of well-being in the coming AI age.“ (Website AAAI) According to the organizers, the first perspective is „(Individually) Responsible AI“, which aims to clarify what kinds of mechanisms or issues should be taken into consideration to design Responsible AI for well-being. The second perspective is „Socially Responsible AI“, which aims to clarify what kinds of mechanisms or issues should be taken into consideration to implement social aspects in Responsible AI for well-being. More information via www.aaai.org/Symposia/Spring/sss23.php#ss09.
Im Südpol Luzern erlebten die Zuschauerinnen und Zuschauer, wie Tanz- und Robotergeschichte geschrieben wurde, von Huang Yi, einem Choreografen aus Taiwan. Der „träumte schon in Kindertagen davon, einen Roboter zum Freund zu haben“ (Information zur Veranstaltung). „Erwachsen geworden, ist für ihn daraus Wirklichkeit geworden, denn er teilt sich, unterstützt von zwei weiteren Tänzern, die Bühne mit Kuka, einem Industrieroboter. Das Ergebnis ist Tanzkunst, die mit messerscharfer Präzision begeistert.“ (Information zur Veranstaltung) Der Robot tanzt wie die Menschen, tanzt mit dem Menschen, mit Huang Yi, die Menschen – es kommen eine Tänzerin und ein Tänzer hinzu – tanzen wie der Robot, lassen sich von ihm bewegen, von seinem „Traktorstrahl“. „Gebannt verfolgt man die Begegnung dieser scheinbar so ungleichen Partner und spürt die emotionale Beziehung. Die Art des Verhältnisses bleibt dabei jedoch in der Schwebe: Sind es nun die vom Choreografen in der Kindheit ersehnten Freunde? Oder handelt es sich vielmehr um einen ausgefeilten und geschmeidigen Wettkampf? Wer lernt von wem? Wer behält die Oberhand?“ (Information zur Veranstaltung) Einmal schaut der Kuka sich selbst an, mit Hilfe einer zwischendurch aufgesteckten Kamera, fertigt bewegte Selfies an, von dem Schild mit seinen technischen Daten, von einem Warnschild. Größere Kunst hat man in der Schweiz selten gesehen.
Oliver Bendel hat schon mehrfach über Roboselfies (auch Robot Selfies genannt) geschrieben. Zum ersten Mal berücksichtigt er nun, in einem Artikel der Zeitschrift Telepolis, eine Aufnahme von Philae. Weltraumroboter sind in der Ferne unterwegs, sie sind allein, um nicht zu sagen einsam, und was liegt näher, als ein Foto von sich selbst zu knipsen und es an die daheimgebliebenen Kohlenstoffeinheiten zu schicken. Der eigentliche Zweck ist natürlich, den Ingenieuren zu zeigen, ob die Instrumente und Apparate in Ordnung sind, ob die Haut eine Beschädigung oder eine Veränderung aufweist. Aus Sicht der Robotik stellt sich die Frage, ob die Selfies zur Weiterentwicklung und zum Selbstlernen beitragen könnten. In welcher Hinsicht ist die egozentrische Perspektive interessant? Kann der Roboter zu neuem Wissen über die ihn unmittelbar umgebende Umwelt kommen? Kann er seine Mimik und Gestik interpretieren und sein Verhalten reflektieren? Kann er nach und nach ein Selbstbewusstsein erlangen oder sich zumindest selbst im Spiegel erkennen? Der Artikel ist am 1. Februar 2015 erschienen und kann über www.heise.de/tp/artikel/43/43793/1.html aufgerufen werden.
Von Weltraumrobotern kennt man Selfies durchaus. Sie sind in der Ferne unterwegs, sie sind allein, um nicht zu sagen einsam, und was liegt näher, als ein Foto von sich selbst zu knipsen und es an die daheimgebliebenen Kohlenstoffeinheiten zu schicken. Begriffe wie „space robot selfies“ und „rover selfies“ machen das Spektrum der „space selfies“ deutlich. Auch der eine oder andere selbstreferenzielle Schnappschuss eines Erdroboters ist im Web zu finden und der eine oder andere autobiografisch anmutende Film. Aus Sicht der Robotik stellt sich die Frage, ob die Selfies zur Weiterentwicklung und zum Selbstlernen beitragen könnten. In welcher Hinsicht ist die egozentrische Perspektive interessant? Kann der Robot zu neuem Wissen über die ihn unmittelbar umgebende Umwelt kommen? Kann er seine Mimik und Gestik interpretieren und sein Verhalten reflektieren? Kann er nach und nach ein Selbstbewusstsein erlangen oder sich zumindest selbst im Spiegel erkennen? Ein Spiegel, wird man einwenden, reicht dem gewöhnlichen Roboter vollkommen aus. Dieser friert die Reflexion ein, die er wahrnimmt, und wertet sie so lange aus, wie er möchte. Mit Selfies kann er aber noch mehr: Er kann anderen Robotern (und Menschen) zeigen, wie er aussieht, er kann auf sich aufmerksam machen, er kann für sich werben. Er kann Eindruck schinden und Feedback erhalten. Wenn Android und Gynoid eines Tages eine Entenschnute ziehen, weiß der Robotiker, dass der Durchbruch geschafft ist. Auch ein Film zum Robot Duckface lässt sich im WWW finden. Überzeugen kann er allerdings nicht.
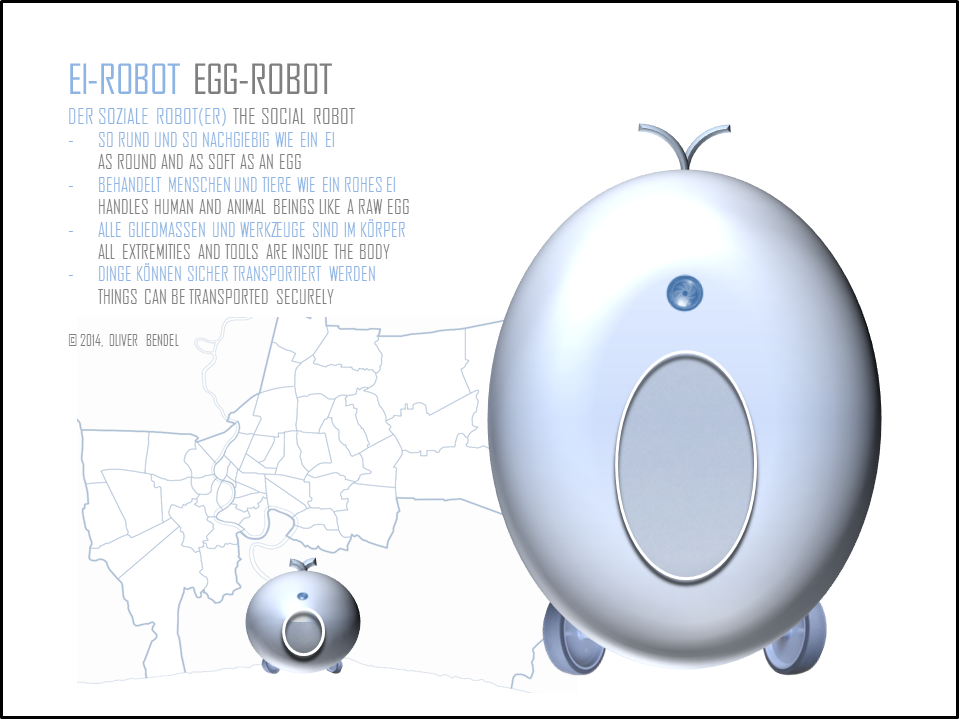
Der soziale Roboter ist eine relativ alte Idee. Einer der Pioniere in diesem Bereich ist William Grey Walter. In den letzten Jahren haben die Forschungen neuen Auftrieb erhalten. Man will und kann Roboter nicht mehr in hermetisch abgeschirmten Bereichen halten. Sie mischen sich unter die Menschen (und die Tiere) – und müssen sowohl sozial als auch (ein Thema der Maschinenethik und der Roboterethik im engeren Sinne) moralisch werden. Der EI-ROBOT ist eine Studie, die veranschaulichen soll, dass man Roboter rund und nachgiebig gestalten kann. Die Gliedmaßen und Werkzeuge verstecken sich im eiförmigen Körper und können bei Bedarf ausgefahren werden. Das Fortbewegungssystem ist nur angedeutet. Der EI-ROBOT könnte fahren, gehen oder fliegen. Im Körper werden Dinge aller Art transportiert, geschützt sowohl durch spezielle Gefäße als auch durch die Ummantelung selbst. Eine Besonderheit ist, dass der Körper sich anpassen und aus dem Ei eine Kugel werden kann. Die Form erinnert übrigens auch an das Ethik-Ei, das auf die engen Beziehungen zwischen den Bereichsethiken aufmerksam macht. Was die moralische Seite des Roboters angeht, müssen sich nicht zuletzt Informationsethik, Technikethik und Rechtsethik verständigen.
Im Gabler Wirtschaftslexikon wird seit 3. Juli 2013 die Roboterethik definiert. Diese kann man sowohl der Maschinen- als auch der Menschenethik zuordnen. In der Roboterethik werde danach gefragt, ob ein Roboter ein Subjekt der Moral sein und wie man diese implementieren kann. Auch der Roboter als Objekt der Moral sowie sein Einfluss auf Menschen sei von Belang. Oliver Bendel erklärt in seinem Beitrag den Begriff der Roboterethik, nimmt die Perspektive der Robotik ein, erwähnt die Robotergesetze von Asimov und gibt eine Einschätzung der Disziplin und einen Ausblick auf ihre weitere Entwicklung. Der Beitrag ist direkt über wirtschaftslexikon.gabler.de/Definition/roboterethik.html abrufbar. Er wurde dem Sachgebiet „Grundlagen der Wirtschaftsinformatik“ zugewiesen. Für das Gabler Wirtschaftslexikon schreiben nach eigenen Angaben über „150 Experten aus Wissenschaft und Praxis“. Mehr als „25.000 Stichwörter stehen kostenlos“ bereit.